GPS Spoofing Detection
Machine learning-based anomaly detection to identify and counter GPS spoofing attacks in autonomous vehicles.
Overview
GPS provides real-time location data, enabling autonomous vehicles to determine their precise position on a map and maintain safe distances from other objects and vehicles. However, GPS spoofing attacks, which involve transmitting falsified signals to mislead receivers, can cause autonomous vehicles to misinterpret their location.
This can result in erroneous positioning data, leading to misrouting of vehicles, accidents, or unauthorized access to restricted areas. Our research focuses on developing a machine learning-based anomaly detection system to identify and counter these GPS spoofing attacks.
Research Problem
- Vulnerability of GPS systems to spoofing attacks
- Difficulty in distinguishing between legitimate and spoofed GPS signals
- Need for real-time detection and mitigation of spoofing attacks
- Challenges in implementing detection systems on resource-constrained devices
- Lack of comprehensive datasets for training anomaly detection models
Research Objectives
- Design and deploy a machine learning-based GPS spoofing detection system
- Collect high-quality GPS data for model training and validation
- Evaluate and select suitable machine learning models for GPS anomaly detection
- Implement the detection system on an embedded device for real-world deployment
- Send real-time alerts and system status to the Android app
Methodology
Our approach uses an IoT-based rover to collect GPS data, train machine learning models, and detect anomalies in real-time.
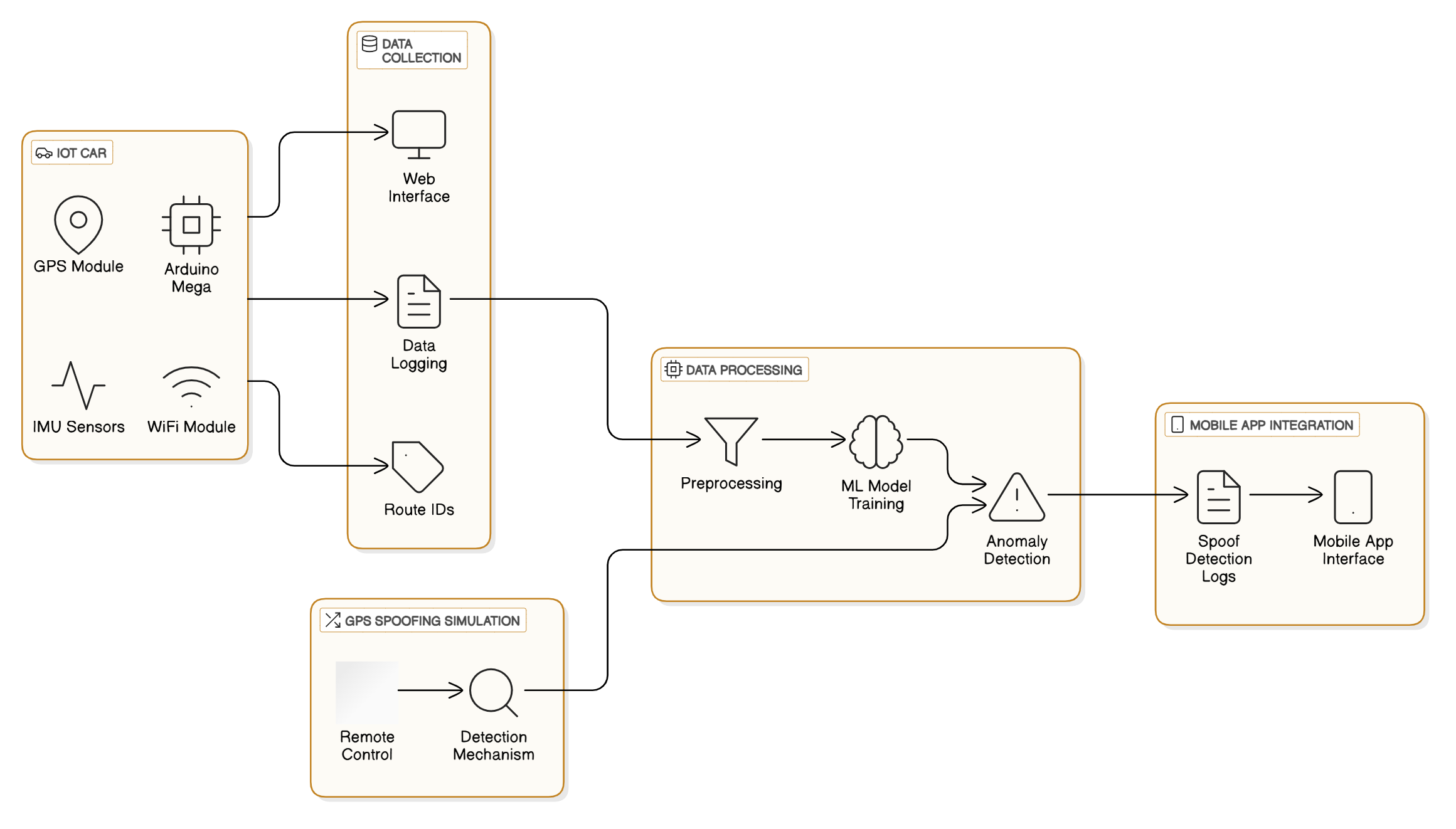
System Architecture
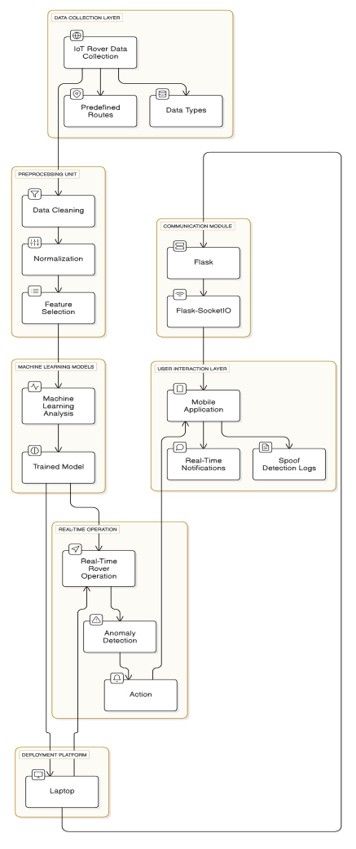
The GPS spoofing detection system consists of several key components:
- IoT-based Rover: A mobile platform equipped with sensors for data collection and testing.
- Data Collection System: Gathers GPS coordinates, speed, and trajectory data along predefined routes.
- Machine Learning Model: Trained to recognize normal paths and detect anomalies.
- Alert System: Integrated with a mobile application to provide real-time notifications.
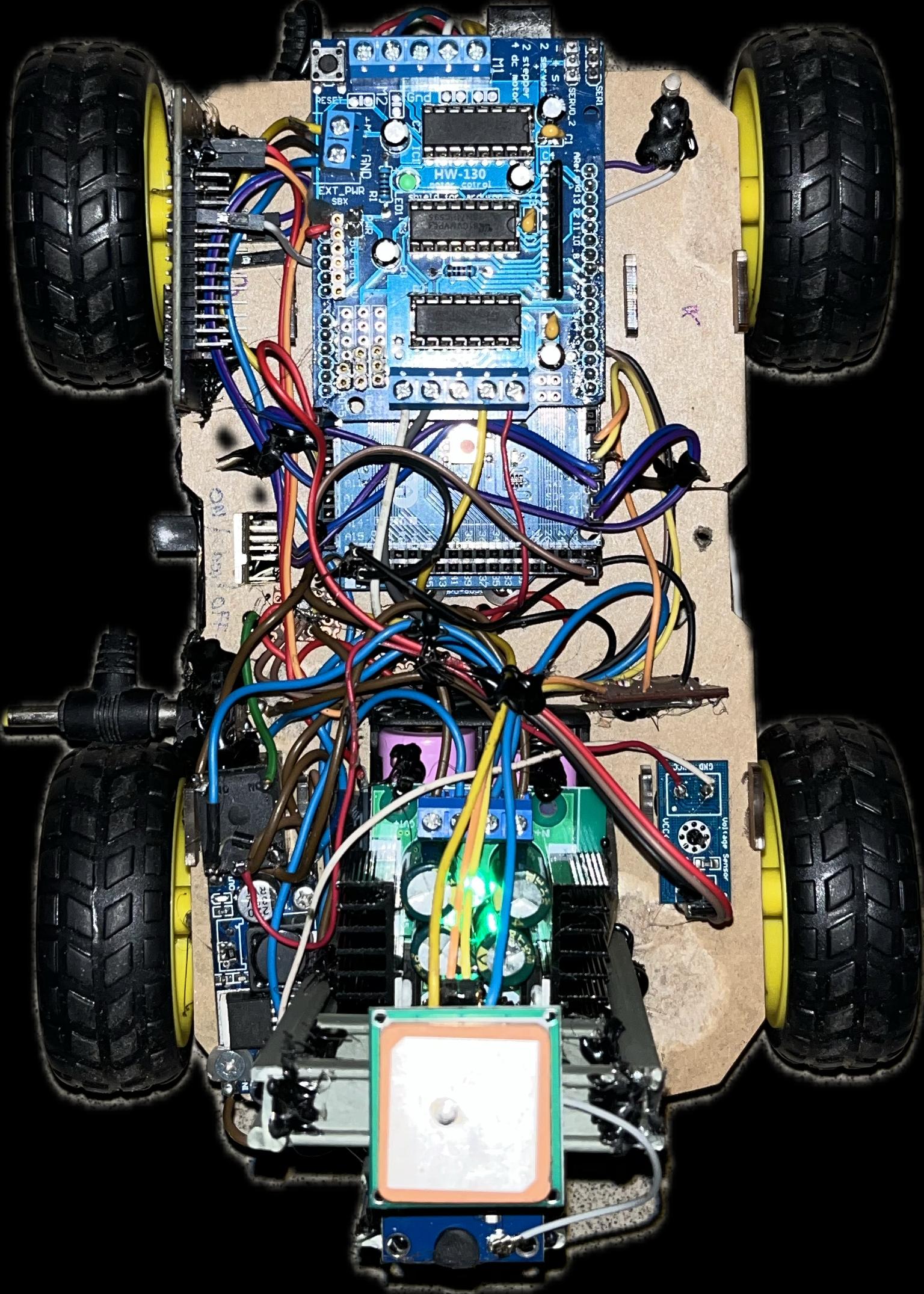
Rover Hardware
- Arduino MEGA Board
- GPS Module
- Accelerometer/Gyroscope
- NodeMCU ESP8266
- Motor Driver & Batteries
ML Models
- Random Forest
- K-Nearest Neighbors
- XGBoost
- Support Vector Machines
- Autoencoders
Mobile Integration
- Real-time alerts
- Authentication logs
- Anomaly visualization
- Secure communication
- User notifications
Current Progress
Our research has made significant progress in data collection, model training, and implementation:
Data Collection
We have successfully built an IoT-based rover and collected GPS, accelerometer, and gyroscope data in different scenarios and behaviors.
Rover Platform
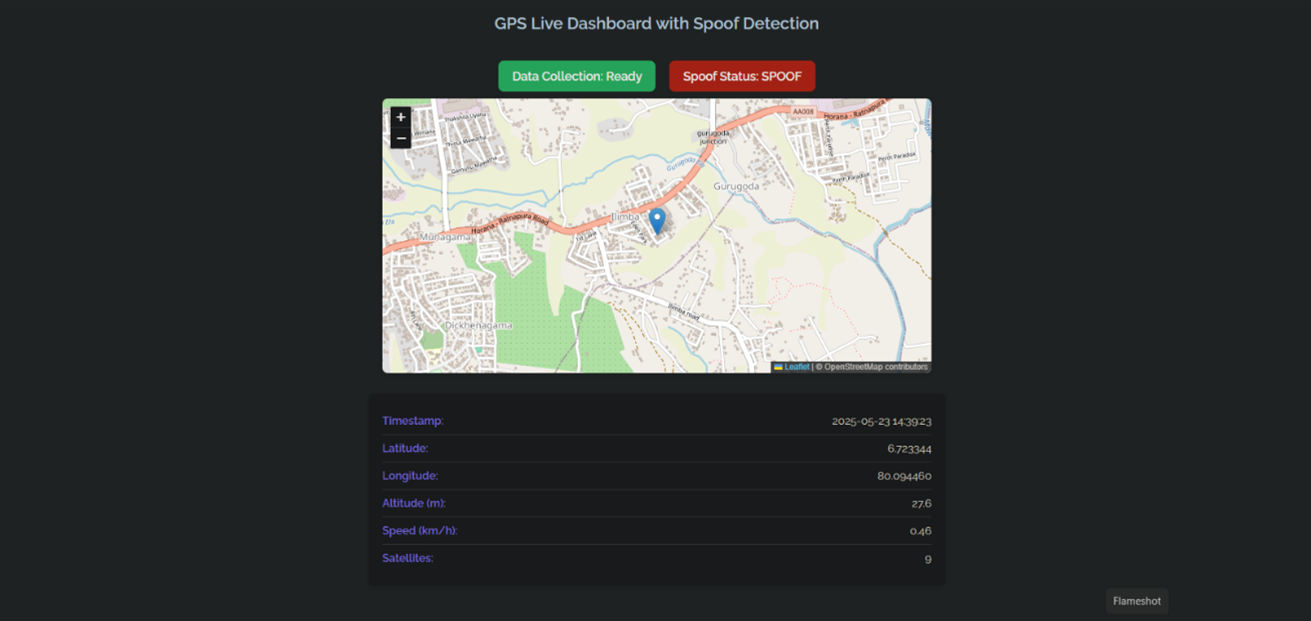
Data Collection Interface
Data Processing & Model Training
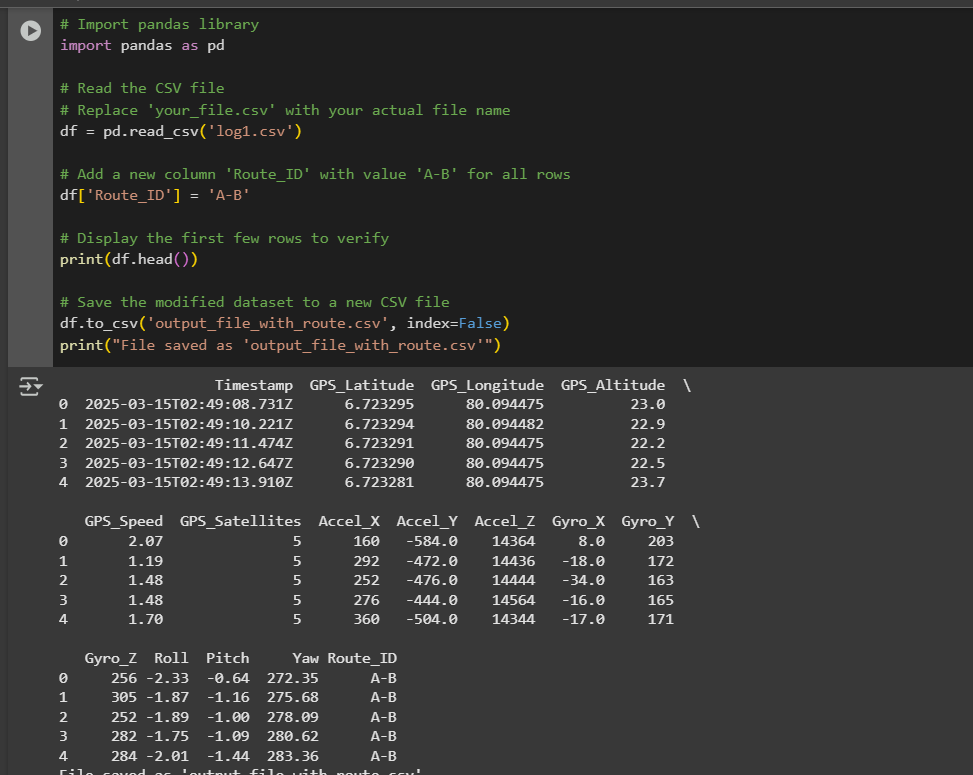
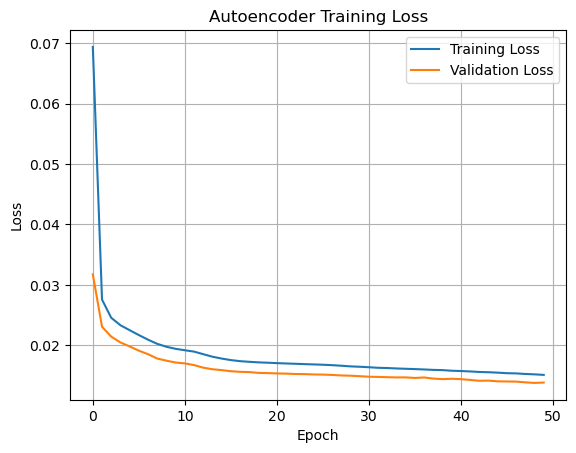
We have processed the collected data, added route identifiers, cleaned and balanced the dataset, and trained machine learning models for anomaly detection.
Data Preprocessing
Model Accuracy
Mobile App Integration
We have integrated the spoofing detection system with a mobile application to provide real-time alerts and authentication logs.